机械的精确诊断和治疗退行性椎间盘疾病

退行性椎间盘疾病引起的腰痛影响大约40%的人口超过40,虽然很多人可能永远不会经历负面影响的障碍,它是为无数美国人慢性背痛的原因。最近的影像学诊断和基于细胞的缸内直喷治疗退行性椎间盘和脊髓损伤对慢性背痛患者的承诺,然而交付的目标区域非常小和狭窄,需要极端的精度由临床医生为了避免骨椎骨和其他敏感的组织。
脊柱区域的规范结构是相当复杂的。每个椎骨之间的纤维软骨盘周围的胶状液囊作为脊柱的减震器,以及脊柱的灵活性。主要神经分支的不同位置的身体穿过这个地区从中央椎管。复杂性增加,如果病人有预先存在的条件,如骨骼畸形由于脊柱侧凸或骨关节炎、脊椎狭窄(椎管的缩小导致压缩)或外科植入物,如板、棒和螺丝。根据类型的治疗,所需的注射,注射定位复杂性,脊髓注射疗法治疗时间框架的范围可以从~ 15分钟到两个小时,不包括需要术后恢复时间。
增加注射部位定位精确,因此效率,这些新的治疗方法的生物机器人和人类建模实验室,乔治·w·伍德拉夫的指导下小君建筑师机械工程学院的教授,已经开发出一种病人注射针安装机器人用于磁共振弹性成像(绝笔)技术相结合的核磁共振成像和低频振动来创建一个图像的映射(移动)软组织的刚度。工作与史蒂文斯理工学院和西奈山医院,团队开发non-ferromagnetic锆钛酸铅(压电)致动器,允许使用产生的磁场区域成像先生。团队的原型演示绝笔扫描用于改善退行性椎间盘疾病的诊断。多源横波传播检查病人的病理状态的组织是通过可调谐振频率的各个执行机构。这允许一个微创手术精度显著增加针定位比可以通过人类的临床医生。
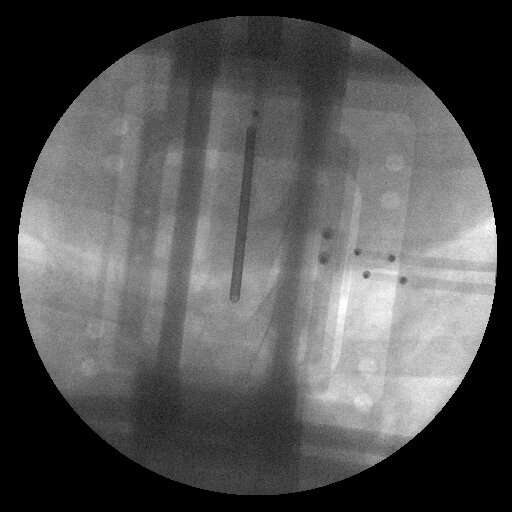
在相关项目中埃默里大学和佐治亚理工学院研究所,教授建筑师和团队开发了一个病人,微创,注射针机器人为脊髓细胞疗法是完全由于non-ferromagnetic核磁共振兼容的材料组成的机器人执行机构。高精度体内性能已通过PZT-driven平行的平面needle-orientation机制和迭代的超分辨率计算机视觉算法。临床前评价猪科模型显示安装和控制器与呼吸功能,而实验室评估显示位置精度~ 14μm所需的位置。
希望这个针的高精度定位机器人和视觉反馈的方法将导致显著改善脊髓的工作流注射程序。双重结果近乎实时的精确定位和图像结合减少手术时间承诺提供易用性为成千上万的背部疼痛患者临床医生和救援。
更多信息:Waiman Meinhold等。直接驱动平行平面压电针定位机器人MRI引导脊柱内的注入,IEEE生物医学工程(2020)。DOI: 10.1109 / TBME.2020.3020926


















